Segway robot nxt lego mindstorms ev3
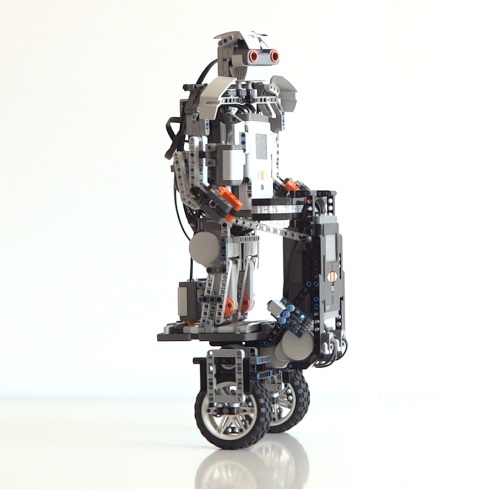
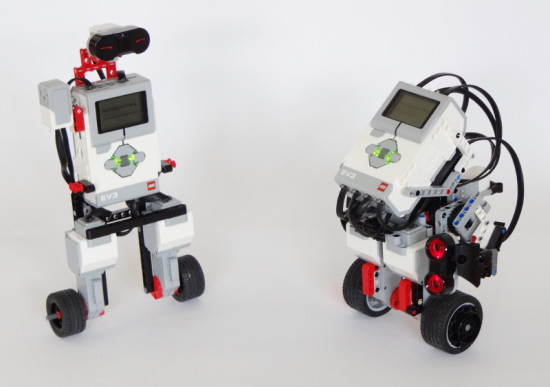
Introducing the HTWay, a Segway type self-balancing robot. Update Nov 8, The NXC version was updated to fix a bug that caused the program to crash when the optimization level was set beyond 1. Update July 28, If you are using the original 1.
While using floating point math is not essential when programming a Segway type robot, it makes the program much easier to understand and to work with. This firmware is fully compatible with the earlier version and will still work with your LEGO Mindstorms 1. You will also need to make the NXC compiler target the 2. Segway robot nxt lego mindstorms ev3 order segway robot nxt lego mindstorms ev3 take advantage of the floating point math support you will also need to download and install the latest test release of BricxCC.
After you download the zip file of the test release, copy the contents over your existing BricxCC installation. This will most likely be c: When you run the program, the first thing it will do is let you select the wheel size that you are using. There are three options: Use the arrow keys to choose and the Orange Enter button to select. The robot will now need to get an initial gyro offset. You segway robot nxt lego mindstorms ev3 think of this as a Gyro Sensor calibration.
In order to get a good gyro offset, the robot will need to be copletely still. If you hold the robot in your hand it will wait until you you put the robot down, and it is not moving, segway robot nxt lego mindstorms ev3 it will get the gyro offset and go on.
HTWay will now start beeping indicating that you have five seconds to get the robot vertical and as balanced segway robot nxt lego mindstorms ev3 possible. At the end of the long beep, let go. You can control it like you would a tank.
Both levers forward and the robot drives forward. Both lever back and it reverses. One lever only and it will turn around one stopped wheel and both levers in opposite directions and it will turn in place. This is a classic problem in control theory.
Prior to the Segway Personal Transporterit was more commonly known as the inverted pendulum problem. Normally when you think of a pendulum, like on a clock, it hangs down below the pivot point where it is stable; the inverted pendulum is one where the center of gravity is above the pivot point in a position that is inherently unstable. To keep it up, the pivot point has to move to catch it when it begins to fall. That is in essence the same problem as making a segway robot balance.
With LEGO robotics, this challenge has been taken up many times. These sensor were used to tell the distance to the floor. If the robot was leaning forward, then the sensors would be closer to the floor so the RCX segway robot nxt lego mindstorms ev3 tell that it was leaning forward.
If it leaned back, then the sensors would be further away from the surface. This was a fantastic creation and Steve even got a place on cable TV fame with this amazing robot. Not only could it balance exceptionally well, it could line track and even spin in circles to impress the crowds. As long as lighting and surface are consistent, segway robot nxt lego mindstorms ev3 robot can tell if it is leaning forwards or backwards based on the light sensor value.
Given the poor resolution of the light sensor, this was an impressive accomplishment. Ryo did an amazing job of describing the physics and his solution that were very valuable in the creation of the current HTWay model. More recently Dave Parker at www. Dave Parker came up with the original idea of using the third motor to offset the balance and to it use to make the robot go forwards or backwards, in a way similar to the real Segway PT which is also controlled by the human rider leaning forwards or backwards.
He calls his creation the AnyWay. If you want to use other sensors, such as the Ultrasonic or Light sensor, in addition to the Gyro sensor that is essential for balancing, you can do that. Both of segway robot nxt lego mindstorms ev3 variables are in degrees per second.
The steering control is based on the desired difference in the motor encoders. These programs have been written so that they work as much as possible the same way.
Below I give some code snippets from the NXC program. If you are a NXT-G programmer, try to follow along. In order to balance, the robot has a control loop which takes four pieces of information into account and then decides how much motor power is needed to stay upright. In a simplified form, the NXC code for the main balance loop looks like this:.
In this code fragment you can see that every time through the balance loop, four pieces of data are obtained: These are the state variables that describe what is currently happening to the robot. To calculate the power these variables are multiplied by respective constants in a four term linear equation, the result being the power needed for the robot to stay balanced.
The trick to making this all work, is finding the right constants. To give you an idea of the role of each term in the balance equation, I will talk about each term one at a time with an attempt to isolate what each one does.
First of all, imagaine that the robot is perfectly balanced and exactly at the desired target position. In that case, all four of the variables will be zero. In other words, the robot is perfecty vertical so the gyroAngle is zero, the robot is not falling forwards or backwards, the robot is not moving and it is exactly in the desired position. Since all four variables are zero, the result of the power equation is also zero. So what if the all the terms are zero except that the robot is leaning forwards, for example the gyroAngle is 5 degrees.
Well if the robot is leaning forwards, then it is necessary to drive forwards to attempt to catch the robot. When multiplied with the gyroAngleit will give the power needed to drive forwards to catch the fall to regain balance. So the robot is upright and not moving, but it has somehow gotten itself into a situation where it is falling forwards.
Even though it is upright now, it is about to be leaning forwards. This term lets the robot respond even before it falls forward. It also plays a role when the robot is leaning but is on its way to becoming upright, in that case this term will prevent the gyroAngle term from making the robot respond when in fact its okay. So what about the two motor terms? Well if the robot is perfectly upright and not falling but the robot is degrees further forward then desired, in that case motorPos will be Remember, motorPos in the HTWay program is the sum of the two motor encoders.
The actual distance of how far forward it is will also depend on the wheel size. If you attempt to just drive backwards back to the zero position, then the robot would actually fall forwards.
The solution is actually to drive forwards, because in order to go backwards, you first have to get the robot to fall backwards. To do that, you drive forwards! The motorSpeed term works in sort of the the same way as motorPos. If the robot is in the middle of driving forwards, then first of all you need segway robot nxt lego mindstorms ev3 least enough power to maintain the speed, and thus the balance, and then you even need a little more to get the robot to lean backwards to make it slow down.
A note about wheel size making it go In the HTWay program you can select the wheel size you are using with a three button interface. What this does is it sets a global variable called ratioWheel to either 0. So what does this actually do? Well the actual balance equation is a little different then what was shown above, here is the full expression used in the program:.
It turns out that the wheel size only needs to play a role with the two gyro sensor terms and not the motor terms. The reason that wheel size is important is because bigger wheels need less power to compensate for being out of balance. Since bigger wheels move further, given a certain amount of input, you need less of it to achieve the same amount of movement.
So segway robot nxt lego mindstorms ev3 not take the wheel size into account on the motor terms? The reason is that these terms are effectively self-relative. If the robot is, for example, one inch too far forwards, then this will be represented by a higher motorPos value for small wheels than for big wheels.
Effectively, for the small wheeled robot this will result in a higher influence on the motor power than what will happen for the same distance using the bigger wheels. Segway robot nxt lego mindstorms ev3 the code above you will also see that the motorControlDrive also plays a role in the balance equation, this is not actually what drives the robot. This term is used to help get segway robot nxt lego mindstorms ev3 robot going as well as to slow it down whenever the motorControlDrive term changes.
When you start driving the robot, this term will cause the robot to first drive backwards a little to quickly get going, then when you stop it will give the robot a little extra boost to help it lean back to slow down. The actual driving comes from this line right above the power balance equation:. Every time through the loop, the motorPos variable is adjusted proportionally to the global variable motorControlDrive.
This moves the target position along which is what makes the robot drive. Integration If you are a young robot builder, you have probably never heard of integration. If you are older, you probably wish you never had. It turns out that integration is really useful and essential for this project. And actually not that hard to understand. The problem is that the Gyro Sensor does not give you an actual angle. All you can tell is the angular velocity, in other words, how fast it is falling. So if you know the angular velocity, how can you get an angle?
Integration is simply the act of adding an infinite series of values over time.
There are differences between private returns costs, the costs returns to society as a whole. Play along with guitar, ukulele, or piano with interactive chords and diagrams. Bitcoin trading: programming a trading bot which connects to your.