Nerdgasm barnacles bitcoin charts
29 comments
Bitcoin mining south africa
If you display a sickness or condition you deficiency several add stuff concerning Colombot. There is 1 comment. (2003) 48: 24892500.
Here is my second article in a series on robot design and programming techniques. In this article I will be discussing how to make a robot follow a line with two sensors. I will be discussing some of the different methods and explain the pros and cons of each. If you have not read the previous article, please do so before continuing:. In the previous article we discussed how you can create a line following program with a single sensor, but we found that there are limitations with what a single sensor is capable of.
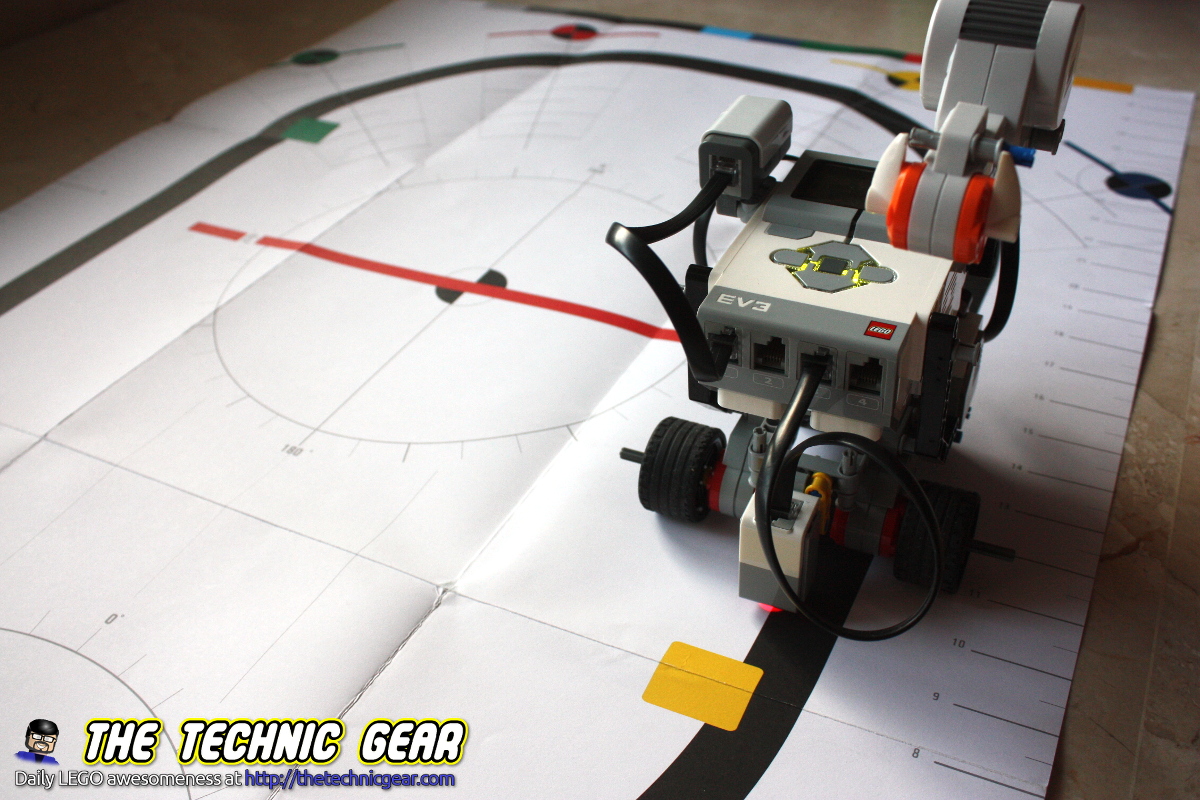
Adding a second sensor so we have one sensor either side of the line solves the issues we saw before. Every sensor is different and will give different readings for the same conditions. While this is not always possible, if you have more than two sensors, test the light readings for each sensor and try and find a pair of sensors that give similar values for black and white.
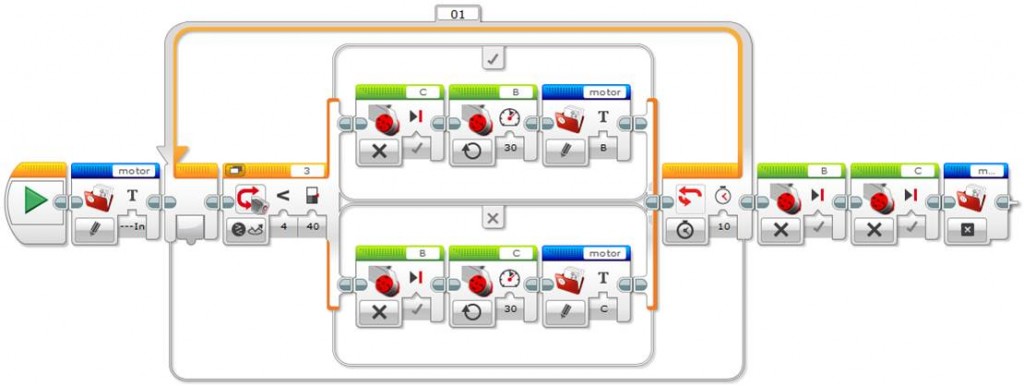
Having a matched pair of sensors will make it much simpler to create programs without having to compensate for differences in sensor readings. This is the simplest of the two sensor line followers and it is also one of the fastest while still staying reliable. The algorithm for this is very straight forward:. This method can work very well, it is reasonably fast, it can handle a gap or break in the line as it will just continue forward when neither sensor see a line following algorithms nxt robot lego mindstorms and with two sensors it can be used to read the green shortcut markers.
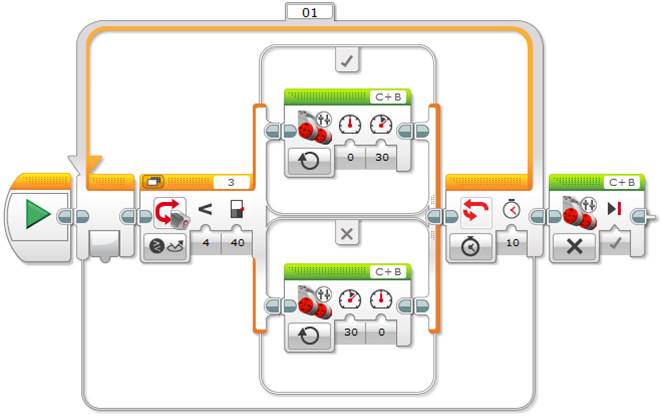
All the problems with a single sensor robot have been resolved. There are some other methods which can be used to get smoother line following, these included stepped, steering and proportional. You could adjust the program to have five steps by breaking the turn left and turn right into two levels of turn.
A couple of approaches you can use are shown below:. Using a stepped line following algorithms nxt robot lego mindstorms will allow for smaller corrections when adjusting for the robot just needs to line following algorithms nxt robot lego mindstorms up. The Steering method is like the Stepped method but with many more steps. If you need it to turn sharper, line following algorithms nxt robot lego mindstorms can multiply the differential by a turn factor to increase the turning values.
Based on the example readings with the range of 10 to 50, the differential can range from to If we multiply this by a turn factor of 2. This final value can be used as the input to the block. The Proportional method also uses the differential value with a turn factor and then uses formulas to calculate the motor power to send to each motor.
An line following algorithms nxt robot lego mindstorms starting point for your formulas could be the following algorithm based on the differential with turn factor range of to The factors and formulas can be adjusted to change the power values. For example, multiplying the differential by a value of 1.
X can make the maximum turning circle sharper. For more information on robotics and the EV3 Basic extensions to Microsoft Small Basic, check out the following links:. I have found that they are complex to program and still cannot follow a line as fast as some of the simpler methods. This article was originally posted on http: You are commenting using your WordPress. You are commenting using your Twitter account.
You are commenting using your Facebook account. Notify me of new comments via email. Notify me of new posts via email. Twitter Facebook LinkedIn Google. Please post feedback or comments Cancel reply Enter your comment here Fill in your details below or click an icon to log in: Email required Address never made public.

If you display a sickness or condition you deficiency several add stuff concerning Colombot. There is 1 comment. (2003) 48: 24892500.