



Free litecoin mining software
29 comments
Anthemis blockchain stockholm
This site uses cookies. To find out more, read our privacy policy. This article was taken from the July issue of Wired magazine. Be the first to read Wired's articles in print before they're posted online, and get your hands on loads of additional content by subscribing online. When he was working towards a masters degree at Cambridge, Daniel Strange had to spend hours dipping bits of metal into mineral and protein solutions to create a bone-like material. It was important work that could lead to advances in medical implants, but it was mind-numbingly boring.
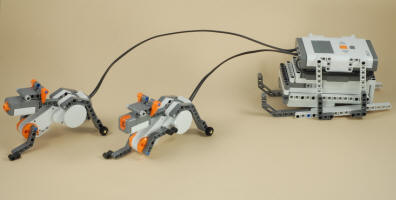
So he automated the process by turning to an unlikely source. Using a Lego Mindstorms NXT kit, Strange, 25, built and programmed a crane that moves in a set path, raising and lowering the sample between beakers containing solutions.
The lab now has two of them working round the clock. It's a very flexible platform. The Lego cranes have already featured in the journal Acta Biomaterialia in a paper on the bone-like material they help produce. Our robots make that easier. Pillars of Eternity 2 captures the joy of tabletop gaming.
The best gadgets and gear right now. Westworld episode 3 recap: Did Dolores kill all the hosts? The best running shoes for men, women, long distance and trails. The best to-do list to help boost your productivity. The ecologists who think moving to cities will save the planet. Can you find the voice of God in a Moog performance of Bach?
As Hubble turns 28, check out the marvel of the Lagoon Nebula. All the best Netflix TV series worth watching right now. And if a ten-year-old can use it, I hoped that I could. Combine Lego with a Raspberry Pi to make the most nostalgic computer of all time. At Open House London this weekend? Here's a handy guide. By Sian Bradley Design 15 Sep This designer uses LEGO to build prosthetics for children injured by landmines.